Welding with 3 FANUC robots
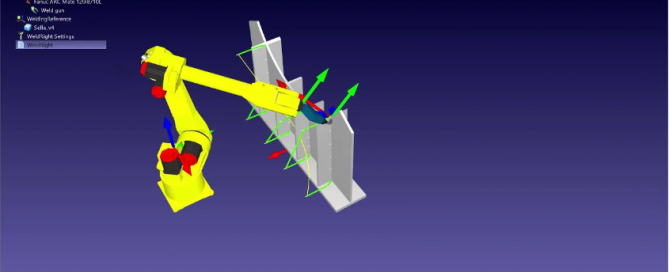
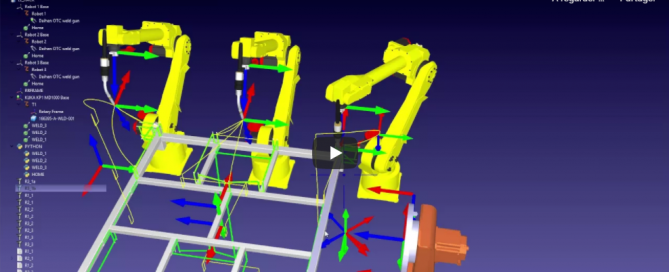
Welding with 3 FANUC robots This video shows how you can use our software to weld with 3 Fanuc Robots. Click here for more informations about -> RoboDK
Welding with 3 FANUC robots This video shows how you can use our software to weld with 3 Fanuc Robots. Click here for more informations about -> RoboDK
Fast Curve Welding This video shows how you can program your robot to do a fast curve welding. Click here for more informations about -> RoboDK
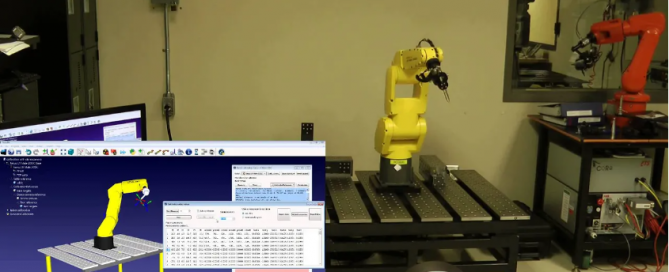
Robot Calibration with Optical CMM This video shows how to calibrate an industrial robot with RoboDK and Creaform's C-Track Stereo Camera (Optical CMM). RoboDK can be used for robot calibration as well as robot simulation and offline programming. Once the robot is calibrated, RoboDK can be used to easily generate accurate robot programs. Click here for more informations about -> RoboDK
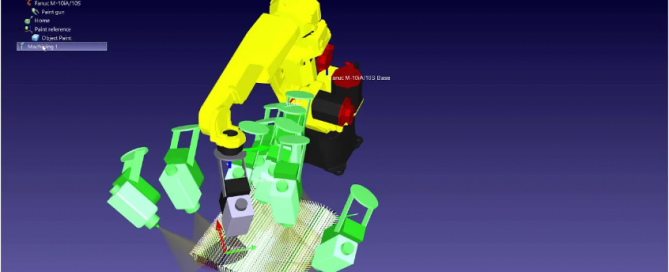
Generate paths along surfaces for painting application This video shows how RoboDK can be used to generate paths along surfaces, for example, to generate zig-zag movements for painting applications or inspection. Click here for more informations about -> RoboDK
Create & Edit a Robot Post Processor The robot Post Processor defines how the robot programs should be generated. The conversion of the simulator movements to specific robot instructions is done by a Post Processor. Post Processors provide complete flexibility to generate the robot programs for specific requirements. Click here for more informations about -> RoboDK
Robot Ballbar Test This video shows how to perform a ballbar test to a robot using RoboDK and a Renishaw QC20-W ballbar. Click here for more informations about -> RoboDK
Generate a Robot Program This video shows how you can generate a robot program. Click here for more informations about -> RoboDK
This manual describes parameter settings required to start up our robotic cell Astro-33. (Legal notice) (You will find a downloadable PDF version at the end of this page.) 1 Bring the robotic cell at its place by hand using the heavy-duty handles or with a forklift using the holes provided for this purpose. Make sure it is in the right position. 2 Pull out the rachet handle, secure the four leveling casters to the floor making sure that all wheels [...]
This manual describes parameter settings required to start up our robotic cell Comet-33 and Comet-44. (Legal notice) (You will find a downloadable PDF version at the end of this page.) 1 Bring the robotic cell at its place by hand using the heavy-duty handles or with a forklift using the holes provided for this purpose. Make sure it is in the right position. 2 Pull out the rachet handle, secure the four leveling casters to the floor making sure [...]
This manual describes parameter settings required to start up our robotic cell Satellite-55 and Satellite-66. (Legal notice) (You will find a downloadable PDF version at the end of this page.) 1 Bring the robotic cell at its place by hand using the heavy-duty handles or with a forklift using the holes provided for this purpose. Make sure it is in the right position. 2 Pull out the rachet handle, secure the four leveling casters to the floor making sure that [...]
Copyright 2019 DIY ROBOTICS.
All Rights Reserved.