DIY Robotics’ blog
KEEP UP WITH THE LATEST NEWS IN
INDUSTRIAL ROBOTICS.
INDUSTRIAL ROBOTICS.
Enjoy! and don’t forget to take a look at our products.

What are The Industrial Robotic Trends in 2021 And After?
The future of industrial robots looks very bright as many companies are looking to automate their production lines, especially with the COVID-19 pandemic. According to a report from Reportlinker from November 2020, industrial robotics which is the top segment in robotics, is about to experience a compound annual growth of 18.2% with revenues growing to $176.8 billion in 2025 from $76.6 billion in 2020.

Why are Robotic kits profitable for businesses?
With an estimated average of 3 million industrial robots in use by the end of 2020, it is clear that more and more businesses are continuously embracing robots within their processes. With the dynamic technological advancements on the rise, we only anticipate even more use of robotic kits both for simple and complex functions.

Switching User Frames without changing the physical points positions
Switching User Frames without changing the physical points positions This procedure is use to change user frame number to a section or all of a program points. You will find a downloadable PDF version at the end of this page. DURATION +/- 15 minutes RECOMMENDATION It's important to create a backup of your settings before making any significant modifications in your program. WARNING! Make sure to switch the "Convert" to "YES" before applying the modifications. DANGER A bad adjustment could lead to robots or tooling collisions. STEP BY STEP PRESS --> [ SELECT ] Choose the program you want to make user frame reference changes. PRESS --> [ ENTER ] PRESS --> [ MENU ] SELECT --> [ 1 ] 1 UTILITIES SELECT --> [ 9 ] 9 Frame Offset PRESS --> [ F4 ] [CHOICE] Select the program in which the changes have to be made. PRESS --> [ [...]

Switching User Frames to change the physical points positions.
Switching User Frames This procedure is use to change user frame number to a section or all of a program points. You will find a downloadable PDF version at the end of this page. DURATION +/- 15 minutes RECOMMENDATION Create a backup of your settings before making any changes to your program. WARNING! Make sure to put "NO" in the convert space before applying the modifications. DANGER Robot collisions may occur if this step is not done correctly. STEP BY STEP PRESS --> [ SELECT ] Choose the program you want to make user frame reference changes. PRESS --> [ ENTER ] PRESS --> [ MENU ] SELECT --> [ 1 ] 1 UTILITIES SELECT --> [ 9 ] 9 Frame Offset PRESS --> [ F4 ] [CHOICE] Select the program in which the changes have to be made PRESS --> [ ENTER ] Using Arrow --> Scroll down to the 2nd [...]
Background edit on TP program
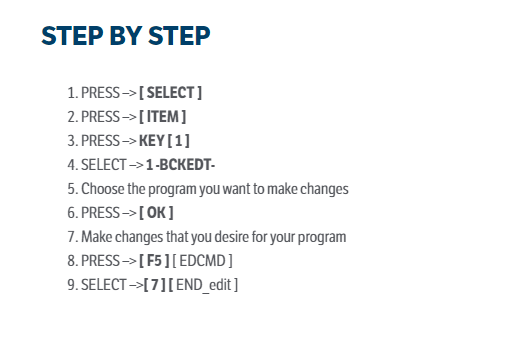
Background edit on TP program This tutorial shows how to background edit a program in Teach Pendant from a FANUC robot. Background edit function allows modification on a TP program with the Teach Pendant selector is turned off (useful in automatic mode). N.B. Modifications in the background editing program can be applied only once the selected program is not running. DURATION +/- 5 minutes RECOMMENDATION Create a backup of your program before making modifications to your program. DANGER Any modification containing bad values could lead to robot collisions. STEP BY STEP PRESS --> [ SELECT ] PRESS --> [ ITEM ] PRESS --> KEY [ 1 ] SELECT --> 1 -BCKEDT- Choose the program you want to make changes PRESS --> [ OK ] Make changes that you desire for your program PRESS --> [ F5 ] [ EDCMD ] SELECT -->[ 7 ] [ END_edit ]
PROGRAMMATION TEMPLATE ZERO
PROGRAMMATION TEMPLATE ZERO LANGUAGE: Karel CREATED: 2019 MODIFIED: 2019 CODE /PROG ZERO /ATTR OWNER = MNEDITOR; COMMENT = ""; PROG_SIZE = 1481; CREATE = DATE 19-08-29 TIME 08:52:32; MODIFIED = DATE 19-11-21 TIME 11:37:10; FILE_NAME = ; VERSION = 0; LINE_COUNT = 19; MEMORY_SIZE = 1777; PROTECT = READ_WRITE; TCD: STACK_SIZE = 0, TASK_PRIORITY = 50, TIME_SLICE = 0, BUSY_LAMP_OFF = 0, ABORT_REQUEST = 0, PAUSE_REQUEST = 0; DEFAULT_GROUP = 1,*,*,*,*; CONTROL_CODE = 00000000 00000000; /MN 1: --eg:Copyright (c) 2019 DIY-Robotics.com All rights reserved. ; 2: --eg: ; 3: --eg:Redistribution and use in source and binary forms, with or without ; 4: --eg:modification, are permitted provided that the following conditions : are ; 5: --eg:met: ; 6: --eg: ; 7: --eg:Redistributions of source code must retain the above copyright ; 8: --eg:notice, this list of conditions and the following disclaimer. ; 9: --eg:Redistributions in binary form must reproduce the above ; 10: --eg:copyright notice, this list of conditions and the following : disclaimer ; 11: --eg:in the documentation and/or other materials provided with the ; 12: --eg:distribution. ; 13: --eg:Neither the name of DIY-Robotics.com nor the names of its ; [...]
